摘要:2024年11月12日,中國(guó)汽車工程學(xué)會(huì)于重慶科學(xué)會(huì)堂召開(kāi)首屆科學(xué)技術(shù)獎(jiǎng)勵(lì)大會(huì)暨高等級(jí)獎(jiǎng)項(xiàng)技術(shù)分享會(huì),以及特等獎(jiǎng)獲獎(jiǎng)項(xiàng)目和創(chuàng)新團(tuán)隊(duì)獎(jiǎng)(零部...
2024年11月12日,中國(guó)汽車工程學(xué)會(huì)于重慶科學(xué)會(huì)堂召開(kāi)首屆科學(xué)技術(shù)獎(jiǎng)勵(lì)大會(huì)暨高等級(jí)獎(jiǎng)項(xiàng)技術(shù)分享會(huì),以及特等獎(jiǎng)獲獎(jiǎng)項(xiàng)目和創(chuàng)新團(tuán)隊(duì)獎(jiǎng)(零部件)獲獎(jiǎng)團(tuán)隊(duì)的技術(shù)分享。會(huì)上,“C-V2X網(wǎng)聯(lián)智能駕駛系統(tǒng)關(guān)鍵技術(shù)及應(yīng)用”榮獲2024年度中國(guó)汽車工程學(xué)會(huì)科學(xué)技術(shù)獎(jiǎng)特等獎(jiǎng)。作為第一完成人,中國(guó)信科集團(tuán)副總經(jīng)理、總工程師陳山枝博士代表項(xiàng)目團(tuán)隊(duì),出席獎(jiǎng)勵(lì)大會(huì),并進(jìn)行技術(shù)分享。

陳山枝博士(右二)代表團(tuán)隊(duì)領(lǐng)獎(jiǎng)
該獎(jiǎng)項(xiàng)獲得者主要參與單位包括:中國(guó)汽車技術(shù)研究中心有限公司、中國(guó)信息通信科技集團(tuán)有限公司、中國(guó)第一汽車集團(tuán)有限公司、上海蔚來(lái)汽車有限公司、東風(fēng)悅享科技有限公司、北京車網(wǎng)科技發(fā)展有限公司、國(guó)汽(北京)智能網(wǎng)聯(lián)汽車研究院有限公司、中信科智聯(lián)科技有限公司、中汽研汽車檢驗(yàn)中心(天津)有限公司、北京郵電大學(xué)等十家單位,項(xiàng)目組聯(lián)合推進(jìn)技術(shù)研發(fā)、標(biāo)準(zhǔn)制定、產(chǎn)品研制、技術(shù)驗(yàn)證,共同推動(dòng)C-V2X車聯(lián)網(wǎng)與智能網(wǎng)聯(lián)汽車融合發(fā)展,推進(jìn)網(wǎng)聯(lián)智能駕駛技術(shù)演進(jìn),賦能車路云一體化和智慧交通服務(wù)。
“中國(guó)汽車工程學(xué)會(huì)科學(xué)技術(shù)獎(jiǎng)”是面向全國(guó)汽車產(chǎn)業(yè)的科學(xué)技術(shù)獎(jiǎng)。該獎(jiǎng)項(xiàng)設(shè)立三十余年,為激勵(lì)汽車科技人才成長(zhǎng),推動(dòng)汽車產(chǎn)業(yè)科技進(jìn)步發(fā)揮了重要作用,已成為我國(guó)汽車產(chǎn)業(yè)具影響力的權(quán)威科技獎(jiǎng)項(xiàng)。
本年度評(píng)審中,中國(guó)汽車工程學(xué)會(huì)組織共評(píng)出技術(shù)發(fā)明獎(jiǎng)特等獎(jiǎng)3項(xiàng)、科技進(jìn)步獎(jiǎng)特等獎(jiǎng)1項(xiàng);技術(shù)發(fā)明獎(jiǎng)一等獎(jiǎng)5項(xiàng)、科技進(jìn)步獎(jiǎng)一等獎(jiǎng)10項(xiàng);技術(shù)發(fā)明獎(jiǎng)二等獎(jiǎng)5項(xiàng)、科技進(jìn)步獎(jiǎng)二等獎(jiǎng)19項(xiàng);科技進(jìn)步獎(jiǎng)三等獎(jiǎng)61項(xiàng)。C-V2X網(wǎng)聯(lián)智能駕駛系統(tǒng)關(guān)鍵技術(shù)及應(yīng)用,作為科技進(jìn)步獎(jiǎng)唯一特等獎(jiǎng)獲獎(jiǎng)項(xiàng)目,是通信、汽車、交通跨領(lǐng)域的交叉科技創(chuàng)新,對(duì)推動(dòng)網(wǎng)聯(lián)技術(shù)上車,實(shí)現(xiàn)智能駕駛安全提升、事故率降低和交通效率提升,具有重要價(jià)值。該項(xiàng)目成果正在支撐我國(guó)智能網(wǎng)聯(lián)汽車和車路云一體化方案落地。

此前,中國(guó)汽車工程學(xué)會(huì)組織召開(kāi)的項(xiàng)目成果評(píng)價(jià)會(huì)認(rèn)為:本項(xiàng)目技術(shù)難度大、系統(tǒng)復(fù)雜、創(chuàng)新性強(qiáng),形成了核心知識(shí)產(chǎn)權(quán),項(xiàng)目總體技術(shù)達(dá)到國(guó)際領(lǐng)先水平,經(jīng)濟(jì)社會(huì)效益顯著,市場(chǎng)前景廣闊,奠定了C-V2X網(wǎng)聯(lián)智能駕駛技術(shù)體系基礎(chǔ)。
01 C-V2X網(wǎng)聯(lián)智能駕駛系統(tǒng)關(guān)鍵技術(shù)及應(yīng)用
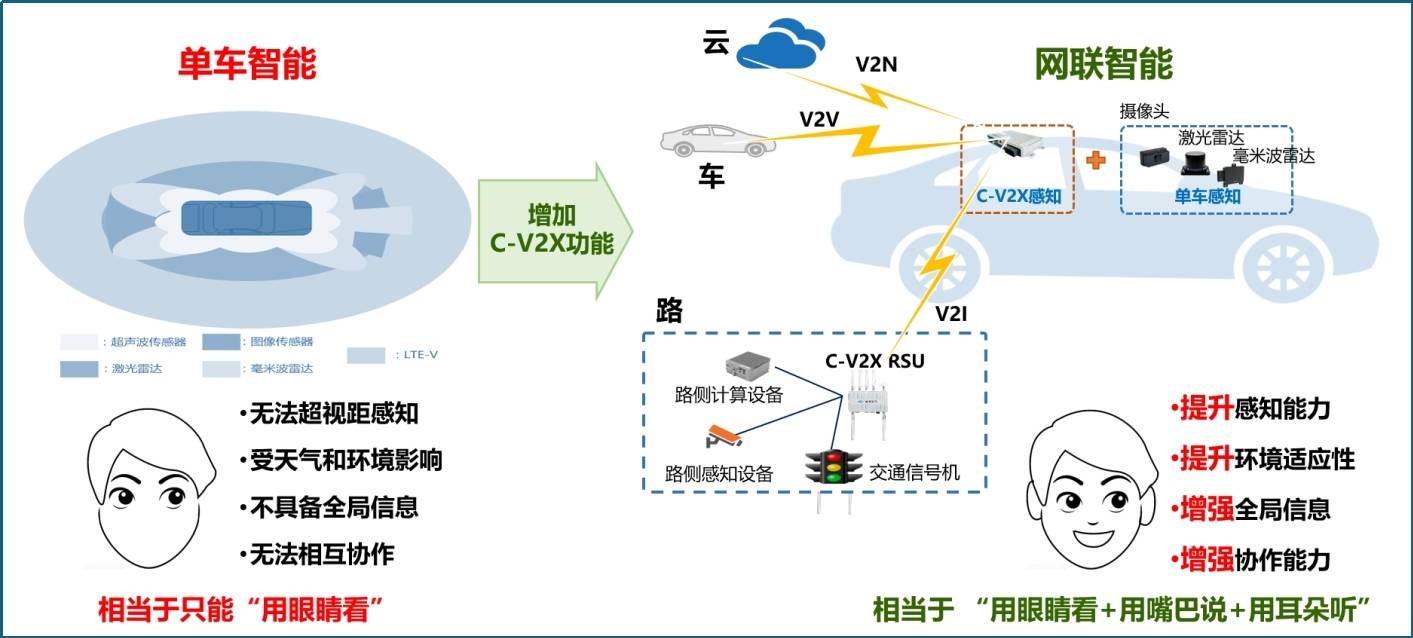
近些年,隨著智能網(wǎng)聯(lián)汽車技術(shù)發(fā)展,我國(guó)單車智能取得巨大進(jìn)展,但仍面臨一系列挑戰(zhàn),包括無(wú)法超視距感知、易受天氣環(huán)境影響、不具備全局信息、無(wú)法相互協(xié)作等局限性。智能網(wǎng)聯(lián)汽車融合C-V2X網(wǎng)聯(lián)智能和單車智能,實(shí)現(xiàn)網(wǎng)聯(lián)智能駕駛,有效克服上述局限,提升駕駛安全、交通效率和舒適性,優(yōu)化全局交通。
二者在融合演進(jìn)過(guò)程中,面臨算法融合、系統(tǒng)設(shè)計(jì)、測(cè)試評(píng)價(jià)等難題。本項(xiàng)目針對(duì)上述難題提出三大技術(shù)創(chuàng)新點(diǎn),具體如下:
1、C-V2X網(wǎng)聯(lián)智能駕駛?cè)诤细兄c決策關(guān)鍵技術(shù)。提出網(wǎng)聯(lián)智能多目標(biāo)信息跨域感知融合技術(shù)、網(wǎng)聯(lián)全量目標(biāo)選擇智能協(xié)同交互決策技術(shù),融合后感知距離達(dá)到500m,位置精度誤差在5%以內(nèi),決策時(shí)機(jī)提前1.5-2.5s,不受環(huán)境和天氣影響。
2、C-V2X網(wǎng)聯(lián)智能駕駛域控制器關(guān)鍵技術(shù)。提出了網(wǎng)聯(lián)智能駕駛?cè)诤嫌蚩刂破髌脚_(tái)架構(gòu)技術(shù),研制出業(yè)界首款網(wǎng)聯(lián)域控制器,通信模組至感知融合模塊的傳輸時(shí)延小于800µs(消息長(zhǎng)度16kB)。提出了C-V2X信號(hào)自適應(yīng)功率補(bǔ)償技術(shù),實(shí)現(xiàn)車內(nèi)復(fù)雜環(huán)境下信號(hào)高可靠傳輸,靈活適應(yīng)不同車型,在樓宇遮擋的十字路口,通信距離可提升146%。
3、C-V2X網(wǎng)聯(lián)智能駕駛測(cè)試技術(shù)與評(píng)價(jià)體系。發(fā)明了網(wǎng)聯(lián)智能駕駛?cè)诤弦惑w化仿真測(cè)試技術(shù)及裝備、C-V2X信息交互一致性與協(xié)同駕駛道路測(cè)試裝備,建立了網(wǎng)聯(lián)智能駕駛場(chǎng)景安全性評(píng)價(jià)模型。全球首次將C-V2X納入NCAP測(cè)評(píng)體系。
該項(xiàng)目相關(guān)技術(shù)、產(chǎn)品及解決方案已應(yīng)用于40余家車企和自動(dòng)駕駛企業(yè),參與并推動(dòng)國(guó)家級(jí)車聯(lián)網(wǎng)先導(dǎo)區(qū)、示范區(qū)、雙智試點(diǎn)城市及車路云一體化試點(diǎn)城市建設(shè),賦能智慧高速、城市交通、智慧園區(qū)等智能駕駛場(chǎng)景。近三年直接經(jīng)濟(jì)效益29.8億元,間接經(jīng)濟(jì)效益500多億元。
02 C-V2X網(wǎng)聯(lián)智能駕駛?cè)绾沃χ悄芫W(wǎng)聯(lián)汽車和智慧交通,讓出行更安全、高效、舒適、低碳
作為科技進(jìn)步獎(jiǎng)特等獎(jiǎng)第一完成人,陳山枝博士對(duì)獲獎(jiǎng)項(xiàng)目進(jìn)行演講分享。其對(duì)C-V2X網(wǎng)聯(lián)智能駕駛技術(shù)價(jià)值進(jìn)行了充分闡釋,并指出 “單車智能是基礎(chǔ),C-V2X是賦能,二者不矛盾、不對(duì)立”。

第一,通過(guò)車車、車路通信,提升感知能力和行駛安全。
基于單車智能,增加C-V2X功能實(shí)現(xiàn)網(wǎng)聯(lián)智能,可有效突破無(wú)法超視距感知、受天氣和環(huán)境影響、不具備全局信息、無(wú)法相互協(xié)作難題,提升感知能力、環(huán)境適應(yīng)性,增強(qiáng)全局信息和協(xié)作能力。
第二,賦能端到端大模型,提升智能駕駛水平。
車路云一體化可拓展端到端大模型訓(xùn)練數(shù)據(jù)集。不僅獲取自車數(shù)據(jù),還可獲取其他車輛數(shù)據(jù)和“上帝視角”路側(cè)數(shù)據(jù),豐富數(shù)據(jù)類型,擴(kuò)大數(shù)據(jù)規(guī)模,增強(qiáng)數(shù)據(jù)質(zhì)量。從而大幅提升訓(xùn)練質(zhì)量及速度,最終提高智能駕駛整體水平。
第三,實(shí)現(xiàn)車路云協(xié)同,降低單車算力挑戰(zhàn)。
通過(guò)C-V2X車路云協(xié)同可降低對(duì)車端高性能AI芯片依賴性,更好應(yīng)對(duì)單車算力挑戰(zhàn),降低整體系統(tǒng)成本。
第四,車路云協(xié)同,優(yōu)化全局交通。
在復(fù)雜路口及群體目標(biāo)識(shí)別困難場(chǎng)景下,通過(guò)車路、車人協(xié)同感知,實(shí)現(xiàn)交通優(yōu)化。一些城市正在探索公交專用車道閑時(shí)共享,即開(kāi)放動(dòng)態(tài)路權(quán)給其他車輛,提升公交車道利用率和通行效率。
同時(shí),他著重強(qiáng)調(diào):“在推進(jìn)C-V2X車路云一體化應(yīng)用,最重要的是分階段、分場(chǎng)景落地”。
典型場(chǎng)景一:解決城市路口事故,保護(hù)弱勢(shì)交通參與者。如鬼探頭場(chǎng)景下,極易發(fā)生交通事故,通過(guò)網(wǎng)聯(lián)智能駕駛能夠避免交通事故,保護(hù)行人、兩輪車等弱勢(shì)交通參與者。
典型場(chǎng)景二:解決高速公路二次事故。高速公路二次事故時(shí)有發(fā)生,如梅大高速塌方和連環(huán)撞車等,容易導(dǎo)致群死群傷,影響惡劣。通過(guò)網(wǎng)聯(lián)智能駕駛的車車感知,實(shí)現(xiàn)預(yù)警,避免事故發(fā)生。
典型場(chǎng)景三:實(shí)現(xiàn)安全預(yù)警,提升駕駛安全。通過(guò)C-V2X前裝或后裝,實(shí)現(xiàn)闖紅燈預(yù)警、交叉路口碰撞預(yù)警、左轉(zhuǎn)輔助預(yù)警、盲區(qū)/變道預(yù)警、逆向超車預(yù)警、緊急制動(dòng)預(yù)警等,用于給司機(jī)提醒,提升駕駛安全。
典型場(chǎng)景四:賦能城市NOA,提升駕駛舒適性。通過(guò)網(wǎng)聯(lián)式智能駕駛的車路協(xié)同,為車輛推送紅綠燈實(shí)時(shí)信息、路側(cè)標(biāo)牌、圓錐桶告警等,加速高速NOA和城市NOA落地。例如,網(wǎng)聯(lián)式C-ACC可獲得紅綠燈相位信息,提升路口通過(guò)能力,實(shí)現(xiàn)全域無(wú)人干預(yù)、流暢、舒適的ACC效果,提升駕駛舒適性。
典型場(chǎng)景五:提升限定區(qū)域L4自動(dòng)駕駛安全和效率。C-V2X正在助力在特定場(chǎng)景,如園區(qū)、機(jī)場(chǎng)、礦區(qū)、港口、停車場(chǎng)、城市道路等的中低速無(wú)人駕駛應(yīng)用,提升安全性及生產(chǎn)效率。
在C-V2X全球規(guī)模化部署中,自2018年,我國(guó)工信部率先為C-V2X分配頻譜,引領(lǐng)全球頻譜政策。2020年,美國(guó)FCC撤銷原分配給DSRC的頻段,其中30MHz帶寬分配給C-V2X。C-V2X 得到中美兩個(gè)汽車與交通大國(guó)認(rèn)可。截至目前,C-V2X已得到全球廣泛認(rèn)可,美國(guó)發(fā)布了加速C-V2X全國(guó)部署計(jì)劃;韓國(guó)明確采用LTE-V2X作為唯一車聯(lián)網(wǎng)通信技術(shù);加拿大明確支持C-V2X技術(shù)路線,分配頻譜;歐洲主要車企宣布選擇C-V2X技術(shù);日本開(kāi)始啟動(dòng)C-V2X技術(shù)研究以支持下一代ITS。
2024年1月,我國(guó)工信部、公安部、自然資源部、住建部、交通部聯(lián)合發(fā)布《關(guān)于開(kāi)展智能網(wǎng)聯(lián)汽車“車路云一體化”應(yīng)用試點(diǎn)工作的通知》;7月,20個(gè)試點(diǎn)城市脫穎而出,加速推進(jìn)路側(cè)和車端部署,加速智能網(wǎng)聯(lián)駕駛和智能網(wǎng)聯(lián)汽車創(chuàng)新發(fā)展。
談及未來(lái)網(wǎng)聯(lián)智能駕駛技術(shù)發(fā)展趨勢(shì),陳山枝認(rèn)為將從具身智能到群體智能。“目前,端到端大模型是具身智能,只具單車自身感知能力,利用車云通信,即車聯(lián)網(wǎng)1.0上傳訓(xùn)練數(shù)據(jù),目標(biāo)是達(dá)到人類老司機(jī)的行駛安全水平。網(wǎng)聯(lián)智能是群體智能,具有車車、車路實(shí)時(shí)交互能力,利用V2V和V2I等實(shí)時(shí)通信,即車聯(lián)網(wǎng)2.0,目標(biāo)是比人類老司機(jī)的行駛安全高一個(gè)量級(jí)以上。”


擊這里給我發(fā)消息")